

Австралийские инженеры спрогнозировали, как будут выглядеть роботы будущего
Специалисты Государственного объединения научных и прикладных исследований Австралии (CSIRO) поделились своим взглядом на то, как могут выглядеть роботы будущего. На самых известных роботов из кинематографа они похожи точно не будут.
В своей статье, опубликованной в журнале Nature Machine Intelligence, исследователи говорят, что концепт роботов будущего будет вдохновлен эволюцией, что позволит создать действительно поразительные и эффективные проекты. Концепция, известная как Multi-Level Evolution (MLE), утверждает, что нынешние роботы существуют в неструктурированных, сложных условиях, потому что недостаточно специализированы, а должны подражать разнообразным животным, которые отлично адаптировались к своей среде.
«Эволюцию не волнует, как что-то выглядит. Она ищет гораздо более широкое пространство для проектирования и предлагает эффективные решения, которые не были бы сразу очевидны для дизайнера-человека. Такие животные, как, например, скат или кенгуру, могут выглядеть весьма необычно для человеческого глаза, однако они идеальны с точки зрения существования в окружающей их среде», - утверждает ведущий автор статьи доктор Дэвид Ховард (David Howard).
В публикации утверждается, что с помощью нынешних передовых технологий уже возможно конструировать самых разных роботов: от мельчайших размеров до таких, что могут выполнять свои миссии в чрезвычайно сложных условиях. Алгоритмы, основанные на естественной эволюции, будут в состоянии автоматически конструировать роботов, комбинируя различные материалы, компоненты, датчики и модели поведения. По оценкам ученых, это может стать реальностью уже через 20 лет.
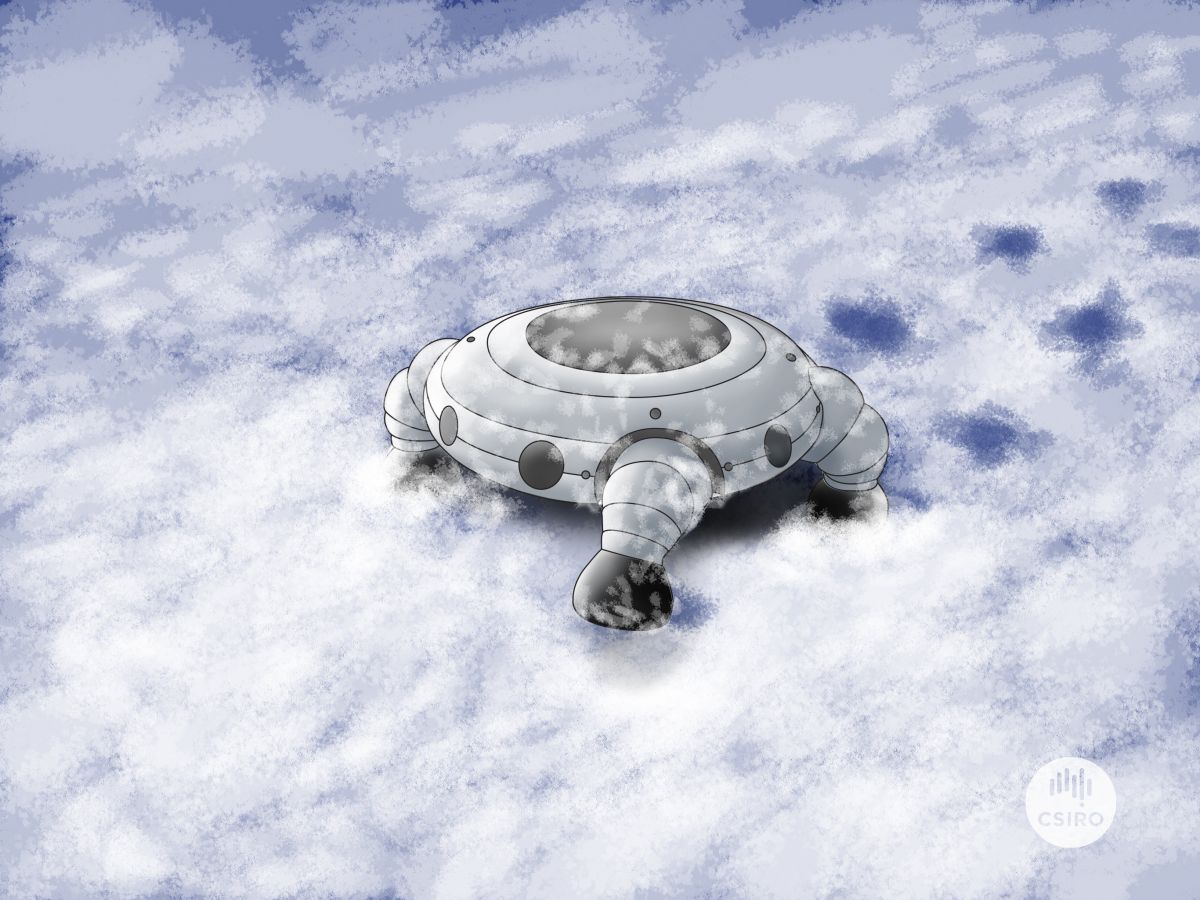
Художественное изображение черепахоподобного робота, созданного для работы в экстремальных условиях Антарктиды. Как черепаха, она будет сильной и выносливой в экстремальных условиях / © CSIRO
Расширенное компьютерное моделирование может затем быстро протестировать прототипы в смоделированных сценариях «реального мира», чтобы определить, какой из них лучше всего работает. Конечным результатом, по мнению авторов работы, должны стать простые, небольшие, высокоинтегрированные, узкоспециализированные и высокорентабельные роботы, точно спроектированные для конкретных задач, конкретной окружающей среды и местности. Машины, которые способны самостоятельно адаптироваться и автоматически улучшать свои показатели.
Одним из удачных примеров может служить робот, предназначенный для базового мониторинга окружающей среды в экстремальных условиях. Подход MLE к проектированию этой машины будет полностью зависеть от местности, климата и других факторов. К примеру, робот, предназначенный для работы в пустыне Сахара, должен будет использовать материалы, способные выдержать жару, песок и пыль, работать от солнечной энергии, уметь передвигаться по песчаным дюнам и использовать ультрафиолет для последующего саморазрушения, чтобы не загрязнять природу.

Художественное изображение робота, способный работать в лесах Амазонии, на создание которого могут вдохновить ползающие ящерицы и гекконы / © CSIRO
Густая растительность Амазонки - совершенно другая проблема. Робот, разработанный для этой среды, должен уметь ползать вокруг деревьев и по упавшим бревнам и получать энергию из растительных материалов джунглей. В обоих случаях MLE автоматически выберет подходящие материалы и компоненты для высокопроизводительной конструкции робота, основываясь на том, насколько хорошо он выполняет заданную задачу. Эта методика, по словам авторов работы, гораздо более практична, чем современные подходы, требующие от инженеров разработки всего одного робота.












